- Contáctenos
- | Juan B. Alberdi 4392, 1° B | Caseros, Bs As, Argentina | Tel. (54-11) 6606-8329
- info@control-technics.com





.jpg&height=150&Quality=75)











 El módulo de automatización estrella de Siemens, el MiniPLC LOGO! 8.3, da un paso de gigante para adaptarse a la digitalización incorporando una conexión a la nube que puede ser activada y configurada directamente por los usuarios.
El módulo de automatización estrella de Siemens, el MiniPLC LOGO! 8.3, da un paso de gigante para adaptarse a la digitalización incorporando una conexión a la nube que puede ser activada y configurada directamente por los usuarios.
 Siemens lanza al mercado SITOP PSU6200, una nueva generación de fuentes de alimentación y módulos de selectividad de SITOP que ofrece además de 24 voltios fiables, una integración de datos en la automatización.
Siemens lanza al mercado SITOP PSU6200, una nueva generación de fuentes de alimentación y módulos de selectividad de SITOP que ofrece además de 24 voltios fiables, una integración de datos en la automatización.
 Siemens presenta dos nuevas incorporaciones a la serie Sitrans LR100 de transmisores de radar de 80 GHz. Estos transmisores compactos de alta frecuencia brindan mediciones robustas y fiable incluso en los entornos más desafiantes.
Siemens presenta dos nuevas incorporaciones a la serie Sitrans LR100 de transmisores de radar de 80 GHz. Estos transmisores compactos de alta frecuencia brindan mediciones robustas y fiable incluso en los entornos más desafiantes.
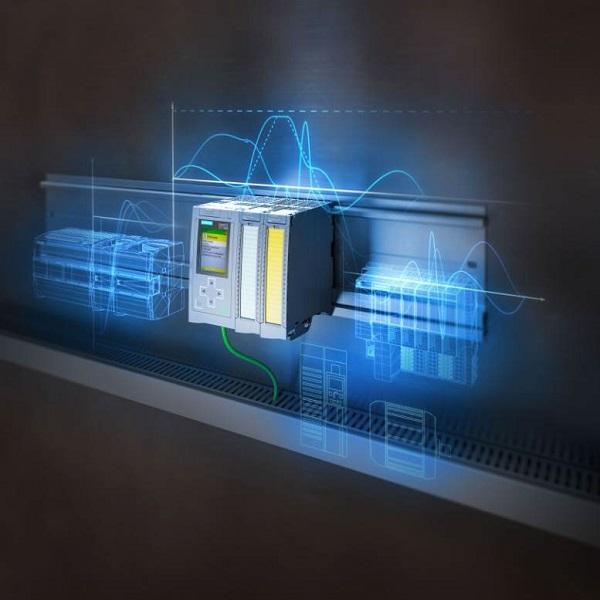 Siemens anuncia el lanzamiento de dos actualizaciones de firmware para controladores Simatic que proporcionan nuevas funciones.
Siemens anuncia el lanzamiento de dos actualizaciones de firmware para controladores Simatic que proporcionan nuevas funciones.

Con el nuevo TIA Portal V16 (Totally Integrated Automation Portal), Siemens ha ampliado su entorno de ingeniería con nuevas funciones prácticas para las diferentes fases, desde la planificación hasta la ingeniería y la puesta en marcha.